Lecture 21 — Machine Learning II#
Neural Networks & Deep Learning#
Computational Physics — Spring 2026
From Logistic Regression to Neural Networks#
In Lecture 20, logistic regression computed:
This is a single neuron: it takes inputs, computes a weighted sum, and passes it through a non-linear activation function \(\sigma\).
A neural network is simply many neurons organised in layers. By stacking layers, the network can learn arbitrarily complex functions — this is the universal approximation theorem.
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['figure.figsize'] = [6, 4]
plt.rcParams['font.size'] = 9
print("Ready for Neural Networks!")
Ready for Neural Networks!
I. Anatomy of a Neural Network#
The Single Neuron (Perceptron)#
A single neuron computes:
where \(\phi\) is a non-linear activation function.
Without \(\phi\), stacking layers would just give another linear transformation — the non-linearity is essential.
# Common activation functions
z = np.linspace(-4, 4, 300)
activations = {
'Sigmoid': 1 / (1 + np.exp(-z)),
'Tanh': np.tanh(z),
'ReLU': np.maximum(0, z),
'Leaky ReLU': np.where(z > 0, z, 0.1 * z),
}
fig, axes = plt.subplots(1, 4, figsize=(14, 3))
for ax, (name, values) in zip(axes, activations.items()):
ax.plot(z, values, 'b-', lw=2)
ax.axhline(0, color='gray', ls='--', alpha=0.3)
ax.axvline(0, color='gray', ls='--', alpha=0.3)
ax.set_title(name)
ax.set_xlabel('z')
ax.grid(alpha=0.2)
plt.tight_layout()
plt.show()
print("Modern networks almost always use ReLU or its variants.")
print("Sigmoid/tanh suffer from 'vanishing gradients' in deep networks.")
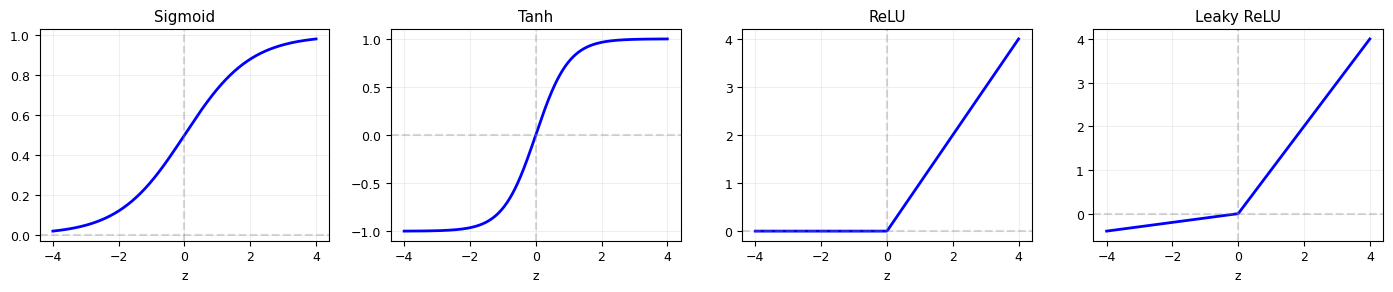
Modern networks almost always use ReLU or its variants.
Sigmoid/tanh suffer from 'vanishing gradients' in deep networks.
Multi-Layer Perceptron (MLP)#
An MLP stacks neurons in layers:
Input (d features) → Hidden layer 1 (h₁ neurons) → Hidden layer 2 (h₂ neurons) → Output
x₁, x₂, ... φ(W₁x + b₁) φ(W₂h₁ + b₂) ŷ
Mathematically, a 2-hidden-layer MLP computes:
Parameters: All the weight matrices \(\mathbf{W}_l\) and bias vectors \(\mathbf{b}_l\).
A network with \(d\) inputs, one hidden layer of \(h\) neurons, and 1 output has \((d+1)h + (h+1) = (d+2)h + 1\) parameters.
Universal Approximation Theorem#
A feedforward network with a single hidden layer containing a finite number of neurons can approximate any continuous function on a compact subset of \(\mathbb{R}^n\), to arbitrary accuracy. — Cybenko (1989), Hornik (1991)
This tells us neural networks are expressive enough in principle. But it says nothing about:
How many neurons we need (could be exponentially many)
Whether gradient descent can find the right weights
Whether the network will generalise
In practice, deeper networks (more layers) are more efficient than wider ones, which is why we use “deep” learning.
II. Building a Neural Network from Scratch#
Before using PyTorch, let’s implement a simple 2-layer MLP manually to understand every step.
# A minimal neural network from scratch (numpy only)
# Task: learn the function f(x) = sin(x) on [0, 2pi]
np.random.seed(42)
# Training data
N = 100
x_data = np.random.uniform(0, 2*np.pi, N)
y_data = np.sin(x_data)
# Normalise inputs (zero mean, unit variance)
# Without this, ~half the ReLU neurons are dead at initialisation
# because x > 0 always and b starts at 0
x_mean, x_std = x_data.mean(), x_data.std()
x_norm = (x_data - x_mean) / x_std
# Network architecture: 1 input -> 32 hidden (ReLU) -> 1 output
n_hidden = 32
# Initialise weights (He initialisation)
W1 = np.random.randn(1, n_hidden) * np.sqrt(2.0 / 1) # (1, 32)
b1 = np.zeros((1, n_hidden)) # (1, 32)
W2 = np.random.randn(n_hidden, 1) * np.sqrt(2.0 / n_hidden) # (32, 1)
b2 = np.zeros((1, 1)) # (1, 1)
print(f"Parameters: W1 {W1.shape}, b1 {b1.shape}, W2 {W2.shape}, b2 {b2.shape}")
print(f"Total parameters: {W1.size + b1.size + W2.size + b2.size}")
Parameters: W1 (1, 32), b1 (1, 32), W2 (32, 1), b2 (1, 1)
Total parameters: 97
def relu(z):
return np.maximum(0, z)
def relu_grad(z):
return (z > 0).astype(float)
def forward(x, W1, b1, W2, b2):
"""Forward pass: input → hidden → output."""
z1 = x @ W1 + b1 # pre-activation of hidden layer
a1 = relu(z1) # activation of hidden layer
z2 = a1 @ W2 + b2 # output (linear, no activation for regression)
return z1, a1, z2
def mse_loss(y_pred, y_true):
"""Mean squared error."""
return np.mean((y_pred - y_true) ** 2)
print("Forward pass and loss defined.")
Forward pass and loss defined.
Backpropagation = Chain Rule#
To update the weights, we need \(\partial L / \partial \mathbf{W}_l\) for each layer. Backpropagation computes these using the chain rule, working backwards from the loss:
This is just the gradient descent from Lecture 15, applied to a more complex function!
# Training loop with backpropagation
X = x_norm.reshape(-1, 1) # (N, 1) — normalised inputs
Y = y_data.reshape(-1, 1) # (N, 1)
lr = 0.01 # learning rate
losses = []
for epoch in range(10000):
# Forward pass
z1, a1, z2 = forward(X, W1, b1, W2, b2)
y_pred = z2
loss = mse_loss(y_pred, Y)
losses.append(loss)
# Backward pass
delta2 = 2.0 / N * (y_pred - Y) # (N, 1)
dW2 = a1.T @ delta2 # (32, 1)
db2 = np.sum(delta2, axis=0, keepdims=True) # (1, 1)
delta1 = (delta2 @ W2.T) * relu_grad(z1) # (N, 32)
dW1 = X.T @ delta1 # (1, 32)
db1 = np.sum(delta1, axis=0, keepdims=True) # (1, 32)
# Gradient descent update (Lecture 15!)
W2 -= lr * dW2
b2 -= lr * db2
W1 -= lr * dW1
b1 -= lr * db1
if epoch % 1000 == 0:
print(f"Epoch {epoch:4d} Loss: {loss:.6f}")
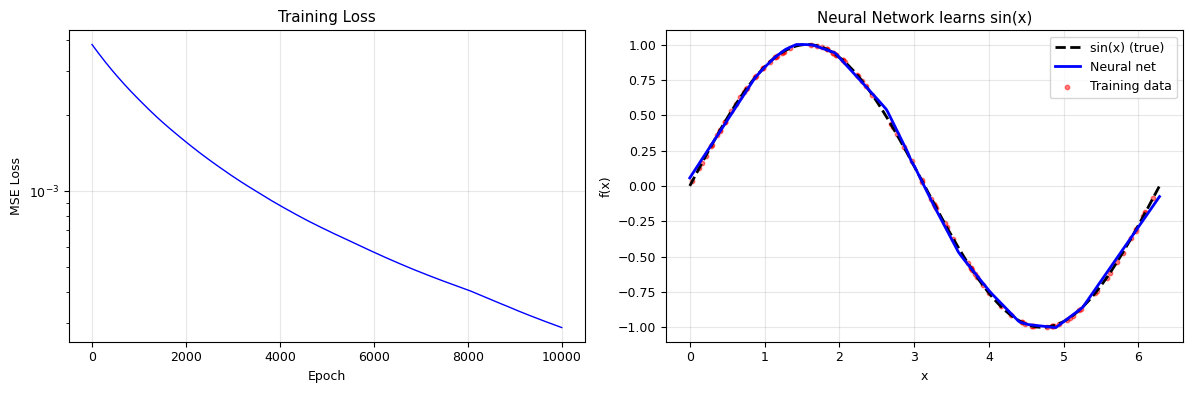
print(f"Final loss: {losses[-1]:.6f}")
Epoch 0 Loss: 0.003822
Epoch 1000 Loss: 0.002310
Epoch 2000 Loss: 0.001570
Epoch 3000 Loss: 0.001145
Epoch 4000 Loss: 0.000879
Epoch 5000 Loss: 0.000701
Epoch 6000 Loss: 0.000574
Epoch 7000 Loss: 0.000477
Epoch 8000 Loss: 0.000406
Epoch 9000 Loss: 0.000340
Final loss: 0.000288
# Visualise the result
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
# Loss curve
axes[0].semilogy(losses, 'b-', lw=1)
axes[0].set_xlabel('Epoch')
axes[0].set_ylabel('MSE Loss')
axes[0].set_title('Training Loss')
axes[0].grid(alpha=0.3)
# Prediction vs truth
x_plot = np.linspace(0, 2*np.pi, 300)
x_plot_norm = ((x_plot - x_mean) / x_std).reshape(-1, 1)
_, _, y_plot = forward(x_plot_norm, W1, b1, W2, b2)
axes[1].plot(x_plot, np.sin(x_plot), 'k--', lw=2, label='sin(x) (true)')
axes[1].plot(x_plot, y_plot, 'b-', lw=2, label='Neural net')
axes[1].scatter(x_data, y_data, c='red', s=10, alpha=0.5, label='Training data')
axes[1].set_xlabel('x'); axes[1].set_ylabel('f(x)')
axes[1].set_title('Neural Network learns sin(x)')
axes[1].legend()
axes[1].grid(alpha=0.3)
plt.tight_layout()
plt.show()
III. PyTorch: Automatic Differentiation#
Writing backpropagation by hand is tedious and error-prone. PyTorch provides:
Tensors — like NumPy arrays but can track gradients
Autograd — automatic differentiation (computes all gradients for you)
nn.Module — building blocks for neural networks
Optimisers — SGD, Adam, etc.
PyTorch builds a computational graph during the forward pass and uses it to compute gradients automatically during the backward pass.
import torch
import torch.nn as nn
print(f"PyTorch version: {torch.__version__}")
print(f"CUDA available: {torch.cuda.is_available()}")
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print(f"Using device: {device}")
PyTorch version: 2.10.0+cpu
CUDA available: False
Using device: cpu
# PyTorch autograd demo
# Compute gradient of f(x) = x^3 + 2x at x = 3
# Analytical: f'(x) = 3x^2 + 2 => f'(3) = 29
x = torch.tensor(3.0, requires_grad=True)
f = x**3 + 2*x
f.backward() # compute df/dx
print(f"f(3) = {f.item():.1f}")
print(f"f'(3) = {x.grad.item():.1f} (analytical: 29.0)")
print("\nPyTorch computed the gradient automatically!")
f(3) = 33.0
f'(3) = 29.0 (analytical: 29.0)
PyTorch computed the gradient automatically!
Building an MLP with nn.Module#
class MLP(nn.Module):
"""Simple Multi-Layer Perceptron."""
def __init__(self, input_dim, hidden_dims, output_dim):
super().__init__()
layers = []
prev_dim = input_dim
for h in hidden_dims:
layers.append(nn.Linear(prev_dim, h))
layers.append(nn.ReLU())
prev_dim = h
layers.append(nn.Linear(prev_dim, output_dim))
self.net = nn.Sequential(*layers)
def forward(self, x):
return self.net(x)
# Create a network: 1 input → [64, 64] hidden → 1 output
model = MLP(input_dim=1, hidden_dims=[64, 64], output_dim=1)
# Count parameters
n_params = sum(p.numel() for p in model.parameters())
print(f"Network architecture:\n{model}")
print(f"\nTotal parameters: {n_params}")
Network architecture:
MLP(
(net): Sequential(
(0): Linear(in_features=1, out_features=64, bias=True)
(1): ReLU()
(2): Linear(in_features=64, out_features=64, bias=True)
(3): ReLU()
(4): Linear(in_features=64, out_features=1, bias=True)
)
)
Total parameters: 4353
# Training loop in PyTorch
torch.manual_seed(42)
# Data
X_t = torch.tensor(x_data, dtype=torch.float32).reshape(-1, 1)
Y_t = torch.tensor(y_data, dtype=torch.float32).reshape(-1, 1)
# Model, loss, optimiser
model = MLP(1, [64, 64], 1)
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.01)
# Train
losses_pt = []
for epoch in range(1000):
optimizer.zero_grad() # clear old gradients
y_pred = model(X_t) # forward pass
loss = criterion(y_pred, Y_t) # compute loss
loss.backward() # backward pass (autograd!)
optimizer.step() # update weights
losses_pt.append(loss.item())
if epoch % 200 == 0:
print(f"Epoch {epoch:4d} Loss: {loss.item():.6f}")
print(f"Final loss: {losses_pt[-1]:.6f}")
Epoch 0 Loss: 0.418733
Epoch 200 Loss: 0.000130
Epoch 400 Loss: 0.000088
Epoch 600 Loss: 0.000016
Epoch 800 Loss: 0.000007
Final loss: 0.000007
# Compare: numpy from scratch vs PyTorch
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
# Loss comparison
axes[0].semilogy(losses, 'r-', alpha=0.7, label='NumPy (from scratch)')
axes[0].semilogy(losses_pt, 'b-', alpha=0.7, label='PyTorch (Adam)')
axes[0].set_xlabel('Epoch')
axes[0].set_ylabel('MSE Loss')
axes[0].set_title('Training convergence')
axes[0].legend()
axes[0].grid(alpha=0.3)
# PyTorch prediction
x_plot_t = torch.linspace(0, 2*np.pi, 300).reshape(-1, 1)
with torch.no_grad():
y_plot_t = model(x_plot_t).numpy()
axes[1].plot(x_plot_t.numpy(), np.sin(x_plot_t.numpy()), 'k--', lw=2, label='sin(x)')
axes[1].plot(x_plot_t.numpy(), y_plot_t, 'b-', lw=2, label='PyTorch MLP')
axes[1].scatter(x_data, y_data, c='red', s=10, alpha=0.5)
axes[1].set_title('PyTorch MLP learns sin(x)')
axes[1].legend()
axes[1].grid(alpha=0.3)
plt.tight_layout()
plt.show()
print("PyTorch + Adam converges much faster than manual SGD!")
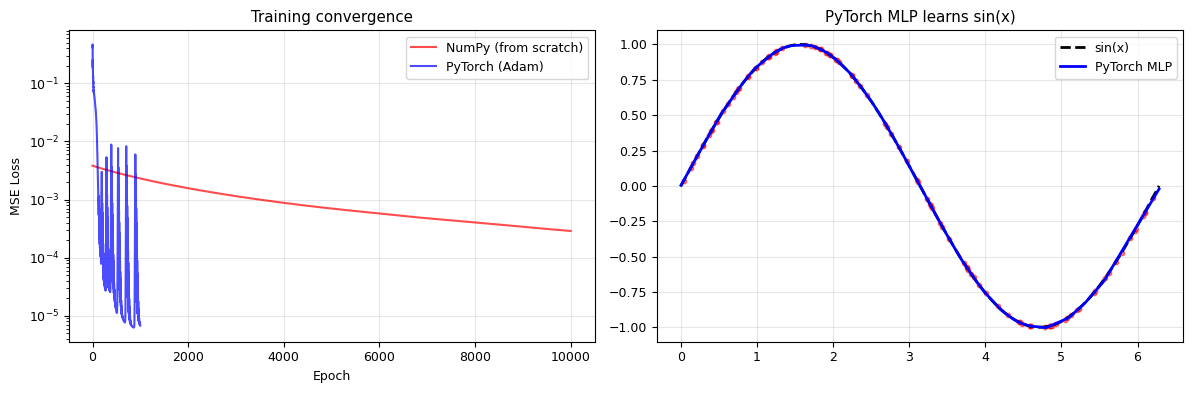
PyTorch + Adam converges much faster than manual SGD!
IV. Training in Practice#
Key Concepts#
Loss Functions#
Task |
Loss |
PyTorch |
|---|---|---|
Regression |
MSE: \(\frac{1}{N}\sum(y-\hat{y})^2\) |
|
Regression |
MAE: $\frac{1}{N}\sum |
y-\hat{y} |
Binary classification |
Cross-entropy |
|
Multi-class |
Cross-entropy |
|
Optimisers#
Optimiser |
Key idea |
When to use |
|---|---|---|
SGD |
Basic gradient descent (Lecture 15) |
Baseline, large-scale |
SGD + momentum |
Accumulate velocity |
Faster convergence |
Adam |
Adaptive learning rate per parameter |
Default choice |
AdamW |
Adam + weight decay |
When regularisation matters |
Mini-Batch Training#
For large datasets, computing the gradient over all \(N\) samples is expensive. Instead, we use mini-batches:
Split data into batches of size \(B\) (typically 32–256)
Compute gradient on each batch → update weights
One pass through all batches = one epoch
This is stochastic gradient descent (SGD) — the gradient is noisy but the noise actually helps escape local minima (recall Monte Carlo / Lecture 14).
from torch.utils.data import TensorDataset, DataLoader
# Create a DataLoader for mini-batch training
dataset = TensorDataset(X_t, Y_t)
loader = DataLoader(dataset, batch_size=16, shuffle=True)
print(f"Dataset size: {len(dataset)}")
print(f"Batch size: 16")
print(f"Batches per epoch: {len(loader)}")
# One epoch of mini-batch training
for batch_x, batch_y in loader:
print(f" Batch shape: {batch_x.shape}")
break # just show the first batch
Dataset size: 100
Batch size: 16
Batches per epoch: 7
Batch shape: torch.Size([16, 1])
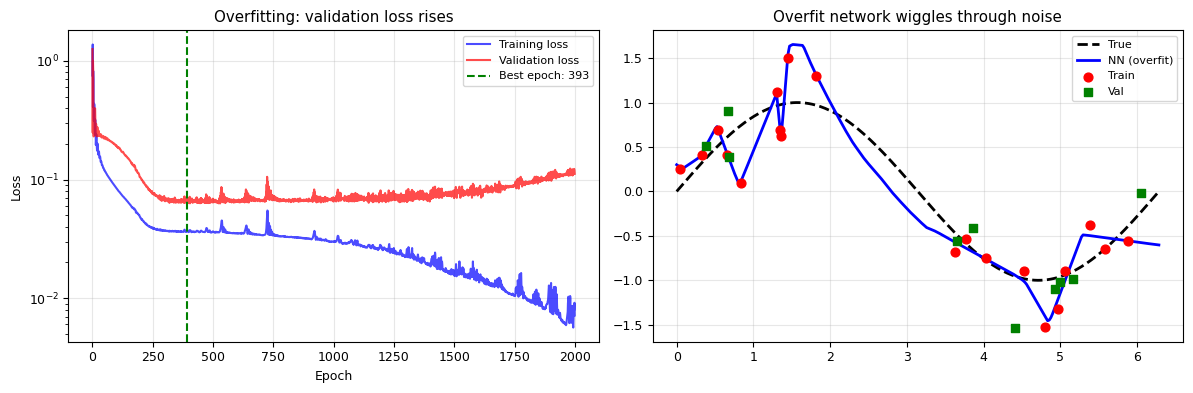
Overfitting and Regularisation in Neural Networks#
Neural networks can have millions of parameters — they can memorise training data perfectly. Common regularisation techniques:
Early stopping: Stop training when validation loss starts increasing
Weight decay (L2 regularisation): Add \(\lambda\|\mathbf{w}\|^2\) to loss
Dropout: Randomly set neurons to zero during training
Data augmentation: Create synthetic training examples
# Demo: Overfitting and early stopping
torch.manual_seed(42)
# Small noisy dataset — easy to overfit
N_small = 30
x_small = np.random.uniform(0, 2*np.pi, N_small)
y_small = np.sin(x_small) + 0.3 * np.random.randn(N_small)
# Split into train/val
X_tr = torch.tensor(x_small[:20], dtype=torch.float32).reshape(-1, 1)
Y_tr = torch.tensor(y_small[:20], dtype=torch.float32).reshape(-1, 1)
X_val = torch.tensor(x_small[20:], dtype=torch.float32).reshape(-1, 1)
Y_val = torch.tensor(y_small[20:], dtype=torch.float32).reshape(-1, 1)
# Big model (easy to overfit with 20 data points)
model_big = MLP(1, [128, 128], 1)
optimizer = torch.optim.Adam(model_big.parameters(), lr=0.005)
criterion = nn.MSELoss()
train_losses, val_losses = [], []
for epoch in range(2000):
model_big.train()
optimizer.zero_grad()
loss_tr = criterion(model_big(X_tr), Y_tr)
loss_tr.backward()
optimizer.step()
model_big.eval()
with torch.no_grad():
loss_val = criterion(model_big(X_val), Y_val)
train_losses.append(loss_tr.item())
val_losses.append(loss_val.item())
# Plot
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].semilogy(train_losses, 'b-', label='Training loss', alpha=0.7)
axes[0].semilogy(val_losses, 'r-', label='Validation loss', alpha=0.7)
best_epoch = np.argmin(val_losses)
axes[0].axvline(best_epoch, color='green', ls='--', label=f'Best epoch: {best_epoch}')
axes[0].set_xlabel('Epoch'); axes[0].set_ylabel('Loss')
axes[0].set_title('Overfitting: validation loss rises')
axes[0].legend(fontsize=8); axes[0].grid(alpha=0.3)
# Prediction at final epoch vs what it should be
x_plot_t = torch.linspace(0, 2*np.pi, 300).reshape(-1, 1)
with torch.no_grad():
y_plot_big = model_big(x_plot_t).numpy()
axes[1].plot(x_plot_t.numpy(), np.sin(x_plot_t.numpy()), 'k--', lw=2, label='True')
axes[1].plot(x_plot_t.numpy(), y_plot_big, 'b-', lw=2, label='NN (overfit)')
axes[1].scatter(x_small[:20], y_small[:20], c='red', s=40, zorder=5, label='Train')
axes[1].scatter(x_small[20:], y_small[20:], c='green', s=40, zorder=5, marker='s', label='Val')
axes[1].set_title('Overfit network wiggles through noise')
axes[1].legend(fontsize=8); axes[1].grid(alpha=0.3)
plt.tight_layout()
plt.show()
V. Physics Application: Learning a Potential Energy Surface#
In computational physics and chemistry, we often need the potential energy \(V(\mathbf{r})\) as a function of atomic positions. Computing this from first principles (DFT, ab initio) is expensive. Can a neural network learn the potential energy surface from training data?
The Lennard-Jones Potential#
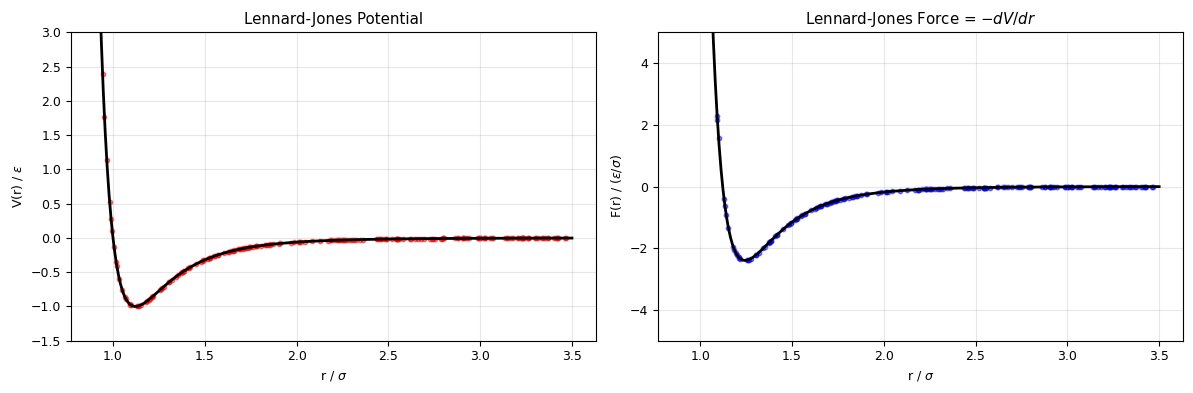
As a test case, we use the Lennard-Jones pair potential:
For a cluster of \(N\) atoms, the total energy is:
We will train a neural network to predict \(V(r)\) and its derivative (the force \(F = -dV/dr\)) simultaneously.
# Lennard-Jones potential and force
def lj_potential(r, epsilon=1.0, sigma=1.0):
"""Lennard-Jones potential."""
sr6 = (sigma / r) ** 6
return 4 * epsilon * (sr6**2 - sr6)
def lj_force(r, epsilon=1.0, sigma=1.0):
"""LJ force = -dV/dr."""
sr6 = (sigma / r) ** 6
return 4 * epsilon * (12 * sr6**2 / r - 6 * sr6 / r)
# Generate training data
np.random.seed(42)
r_train = np.random.uniform(0.9, 3.5, 200)
V_train = lj_potential(r_train)
F_train = lj_force(r_train)
# Visualise
r_plot = np.linspace(0.9, 3.5, 500)
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].plot(r_plot, lj_potential(r_plot), 'k-', lw=2)
axes[0].scatter(r_train, V_train, c='red', s=10, alpha=0.5)
axes[0].set_xlabel('r / $\\sigma$'); axes[0].set_ylabel('V(r) / $\\varepsilon$')
axes[0].set_title('Lennard-Jones Potential')
axes[0].set_ylim(-1.5, 3); axes[0].grid(alpha=0.3)
axes[1].plot(r_plot, lj_force(r_plot), 'k-', lw=2)
axes[1].scatter(r_train, F_train, c='blue', s=10, alpha=0.5)
axes[1].set_xlabel('r / $\\sigma$'); axes[1].set_ylabel('F(r) / ($\\varepsilon / \\sigma$)')
axes[1].set_title('Lennard-Jones Force = $-dV/dr$')
axes[1].set_ylim(-5, 5); axes[1].grid(alpha=0.3)
plt.tight_layout()
plt.show()
Training a Neural Network Potential#
We train a network to predict \(V(r)\), but we also want it to predict the correct force \(F = -dV/dr\).
Key trick: use PyTorch’s autograd to compute \(-dV_{\text{NN}}/dr\) and include it in the loss:
This is a preview of physics-informed training (Lecture 23).
# Neural network potential with force matching
torch.manual_seed(42)
class NNPotential(nn.Module):
"""Neural network that predicts energy and force."""
def __init__(self):
super().__init__()
self.net = nn.Sequential(
nn.Linear(1, 64),
nn.Tanh(),
nn.Linear(64, 64),
nn.Tanh(),
nn.Linear(64, 1),
)
def forward(self, r):
return self.net(r)
def energy_and_force(self, r):
"""Compute energy and force (via autograd)."""
r.requires_grad_(True)
V = self.forward(r)
# Force = -dV/dr, computed by autograd
F = -torch.autograd.grad(
V.sum(), r, create_graph=True
)[0]
return V, F
nn_pot = NNPotential()
n_params = sum(p.numel() for p in nn_pot.parameters())
print(f"NN Potential: {n_params} parameters")
NN Potential: 4353 parameters
# Prepare data as tensors
r_t = torch.tensor(r_train, dtype=torch.float32).reshape(-1, 1)
V_t = torch.tensor(V_train, dtype=torch.float32).reshape(-1, 1)
F_t = torch.tensor(F_train, dtype=torch.float32).reshape(-1, 1)
optimizer = torch.optim.Adam(nn_pot.parameters(), lr=0.005)
force_weight = 1.0 # relative weight of force loss
losses_energy, losses_force = [], []
for epoch in range(3000):
optimizer.zero_grad()
V_pred, F_pred = nn_pot.energy_and_force(r_t.clone())
loss_E = nn.MSELoss()(V_pred, V_t)
loss_F = nn.MSELoss()(F_pred, F_t)
loss = loss_E + force_weight * loss_F
loss.backward()
optimizer.step()
losses_energy.append(loss_E.item())
losses_force.append(loss_F.item())
if epoch % 600 == 0:
print(f"Epoch {epoch:4d} Energy loss: {loss_E.item():.6f} Force loss: {loss_F.item():.6f}")
print(f"\nFinal — Energy loss: {losses_energy[-1]:.6f}, Force loss: {losses_force[-1]:.6f}")
Epoch 0 Energy loss: 0.396379 Force loss: 178.423416
Epoch 600 Energy loss: 0.000025 Force loss: 0.008059
Epoch 1200 Energy loss: 0.000022 Force loss: 0.004959
Epoch 1800 Energy loss: 0.000016 Force loss: 0.003905
Epoch 2400 Energy loss: 0.000477 Force loss: 0.141569
Final — Energy loss: 0.000006, Force loss: 0.002581
# Evaluate the trained NN potential
r_test = torch.linspace(0.9, 3.5, 500).reshape(-1, 1)
nn_pot.eval()
V_nn, F_nn = nn_pot.energy_and_force(r_test.clone())
V_nn = V_nn.detach().numpy()
F_nn = F_nn.detach().numpy()
fig, axes = plt.subplots(1, 3, figsize=(15, 4))
# Energy
axes[0].plot(r_test.numpy(), lj_potential(r_test.numpy()), 'k--', lw=2, label='True LJ')
axes[0].plot(r_test.numpy(), V_nn, 'b-', lw=2, label='NN potential')
axes[0].set_xlabel('r / $\\sigma$'); axes[0].set_ylabel('V(r)')
axes[0].set_title('Potential Energy')
axes[0].set_ylim(-1.5, 3); axes[0].legend(); axes[0].grid(alpha=0.3)
# Force
axes[1].plot(r_test.numpy(), lj_force(r_test.numpy()), 'k--', lw=2, label='True force')
axes[1].plot(r_test.numpy(), F_nn, 'r-', lw=2, label='NN force (autograd)')
axes[1].set_xlabel('r / $\\sigma$'); axes[1].set_ylabel('F(r)')
axes[1].set_title('Force = $-dV/dr$')
axes[1].set_ylim(-5, 5); axes[1].legend(); axes[1].grid(alpha=0.3)
# Training curves
axes[2].semilogy(losses_energy, 'b-', alpha=0.7, label='Energy loss')
axes[2].semilogy(losses_force, 'r-', alpha=0.7, label='Force loss')
axes[2].set_xlabel('Epoch'); axes[2].set_ylabel('MSE')
axes[2].set_title('Training progress')
axes[2].legend(); axes[2].grid(alpha=0.3)
plt.tight_layout()
plt.show()
print("The NN learns both the potential AND the correct forces!")
print("The force comes 'for free' via automatic differentiation.")
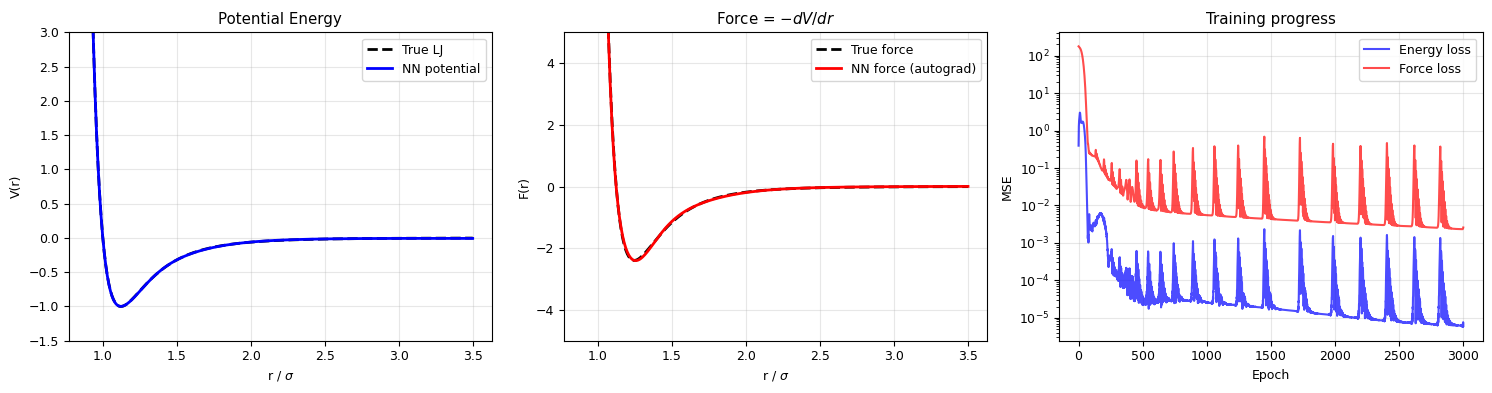
The NN learns both the potential AND the correct forces!
The force comes 'for free' via automatic differentiation.
VI. Multi-Atom System: LJ Cluster Energy#
Now let’s predict the total energy of a small cluster of atoms, where the energy depends on all pairwise distances.
def lj_cluster_energy(positions, epsilon=1.0, sigma=1.0):
"""Total LJ energy for a cluster of atoms.
positions: (N_atoms, 3) array
"""
N = len(positions)
E = 0.0
for i in range(N):
for j in range(i+1, N):
r = np.linalg.norm(positions[i] - positions[j])
E += lj_potential(r, epsilon, sigma)
return E
def get_pairwise_distances(positions):
"""Compute all pairwise distances (sorted) as features."""
N = len(positions)
dists = []
for i in range(N):
for j in range(i+1, N):
dists.append(np.linalg.norm(positions[i] - positions[j]))
return np.sort(dists) # sorted for permutation invariance
# Generate random 4-atom clusters and compute their energies
np.random.seed(42)
n_samples = 2000
n_atoms = 4
n_pairs = n_atoms * (n_atoms - 1) // 2 # = 6 pairwise distances
X_cluster = []
E_cluster = []
for _ in range(n_samples):
# Random positions near the equilibrium distance
pos = np.random.randn(n_atoms, 3) * 0.8
dists = get_pairwise_distances(pos)
# Skip configurations with atoms too close
if dists.min() < 0.8:
continue
E = lj_cluster_energy(pos)
X_cluster.append(dists)
E_cluster.append(E)
X_cluster = np.array(X_cluster)
E_cluster = np.array(E_cluster)
print(f"Generated {len(X_cluster)} valid configurations")
print(f"Features per sample: {n_pairs} pairwise distances")
print(f"Energy range: [{E_cluster.min():.2f}, {E_cluster.max():.2f}]")
Generated 1262 valid configurations
Features per sample: 6 pairwise distances
Energy range: [-4.20, 77.49]
# Train NN to predict cluster energy from pairwise distances
from sklearn.model_selection import train_test_split as tts
X_tr, X_te, E_tr, E_te = tts(X_cluster, E_cluster, test_size=0.2, random_state=42)
# Standardise
X_mean, X_std = X_tr.mean(axis=0), X_tr.std(axis=0)
E_mean, E_std = E_tr.mean(), E_tr.std()
X_tr_n = (X_tr - X_mean) / X_std
X_te_n = (X_te - X_mean) / X_std
E_tr_n = (E_tr - E_mean) / E_std
E_te_n = (E_te - E_mean) / E_std
# Tensors
X_tr_t = torch.tensor(X_tr_n, dtype=torch.float32)
E_tr_t = torch.tensor(E_tr_n, dtype=torch.float32).reshape(-1, 1)
X_te_t = torch.tensor(X_te_n, dtype=torch.float32)
E_te_t = torch.tensor(E_te_n, dtype=torch.float32).reshape(-1, 1)
# Train
torch.manual_seed(42)
cluster_model = MLP(n_pairs, [128, 128, 64], 1)
optimizer = torch.optim.Adam(cluster_model.parameters(), lr=0.002)
criterion = nn.MSELoss()
loader = DataLoader(TensorDataset(X_tr_t, E_tr_t), batch_size=64, shuffle=True)
train_l, val_l = [], []
for epoch in range(300):
cluster_model.train()
epoch_loss = 0
for bx, by in loader:
optimizer.zero_grad()
loss = criterion(cluster_model(bx), by)
loss.backward()
optimizer.step()
epoch_loss += loss.item()
train_l.append(epoch_loss / len(loader))
cluster_model.eval()
with torch.no_grad():
val_l.append(criterion(cluster_model(X_te_t), E_te_t).item())
if epoch % 60 == 0:
print(f"Epoch {epoch:3d} Train: {train_l[-1]:.5f} Val: {val_l[-1]:.5f}")
print(f"Final val loss: {val_l[-1]:.5f}")
Epoch 0 Train: 0.79955 Val: 0.82202
Epoch 60 Train: 0.00539 Val: 0.05320
Epoch 120 Train: 0.00759 Val: 0.04778
Epoch 180 Train: 0.01588 Val: 0.04999
Epoch 240 Train: 0.02666 Val: 0.07756
Final val loss: 0.04686
# Parity plot: predicted vs true energy
cluster_model.eval()
with torch.no_grad():
E_pred_n = cluster_model(X_te_t).numpy().flatten()
# Un-standardise
E_pred = E_pred_n * E_std + E_mean
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
# Parity plot
axes[0].scatter(E_te, E_pred, s=10, alpha=0.5)
emin, emax = min(E_te.min(), E_pred.min()), max(E_te.max(), E_pred.max())
axes[0].plot([emin, emax], [emin, emax], 'r--', lw=2, label='Perfect')
axes[0].set_xlabel('True Energy ($\\varepsilon$)')
axes[0].set_ylabel('Predicted Energy ($\\varepsilon$)')
axes[0].set_title('Parity Plot: NN vs True')
axes[0].legend(); axes[0].grid(alpha=0.3)
# Error distribution
errors = E_pred - E_te
axes[1].hist(errors, bins=40, edgecolor='black', alpha=0.7)
axes[1].set_xlabel('Prediction Error ($\\varepsilon$)')
axes[1].set_ylabel('Count')
axes[1].set_title(f'Error Distribution (MAE = {np.abs(errors).mean():.4f})')
axes[1].axvline(0, color='red', ls='--')
plt.tight_layout()
plt.show()
from sklearn.metrics import r2_score
print(f"R² score: {r2_score(E_te, E_pred):.4f}")
print(f"MAE: {np.abs(errors).mean():.4f} epsilon")
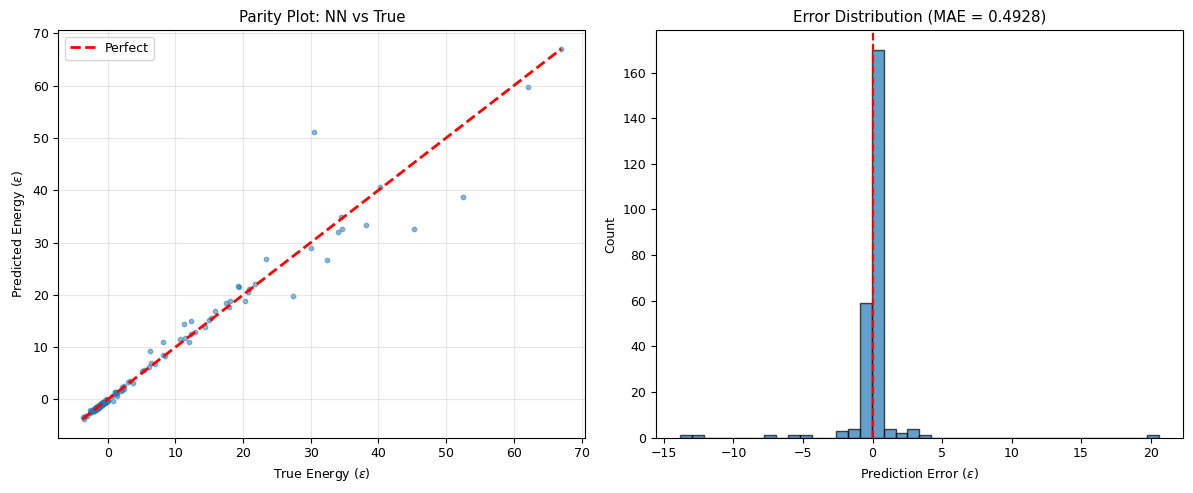
R² score: 0.9652
MAE: 0.4928 epsilon
VII. Ising Model Revisited: NN Classifier#
Let’s revisit the Ising phase classification from Lecture 21, now using a neural network.
# Generate Ising data (same as Lecture 21)
def metropolis_ising(L, T, n_sweeps=1000, n_equil=500):
spins = np.random.choice([-1, 1], size=(L, L))
beta = 1.0 / T
configs = []
for sweep in range(n_sweeps):
for _ in range(L * L):
i, j = np.random.randint(0, L, size=2)
neighbours = (
spins[(i+1) % L, j] + spins[(i-1) % L, j] +
spins[i, (j+1) % L] + spins[i, (j-1) % L]
)
dE = 2 * spins[i, j] * neighbours
if dE <= 0 or np.random.rand() < np.exp(-beta * dE):
spins[i, j] *= -1
if sweep >= n_equil and sweep % 10 == 0:
configs.append(spins.copy())
return configs
L = 16
T_c = 2.269
temperatures = np.concatenate([np.linspace(1.0, 2.0, 6), np.linspace(2.5, 4.0, 6)])
X_ising, y_ising = [], []
print("Generating Ising data...")
for T in temperatures:
configs = metropolis_ising(L, T, n_sweeps=2000, n_equil=1000)
for cfg in configs:
X_ising.append(cfg.flatten().astype(np.float32))
y_ising.append(0 if T < T_c else 1)
X_ising = np.array(X_ising)
y_ising = np.array(y_ising)
print(f"Dataset: {len(X_ising)} samples, {X_ising.shape[1]} features")
Generating Ising data...
Dataset: 1200 samples, 256 features
# Split and convert to tensors
X_tr, X_te, y_tr, y_te = tts(X_ising, y_ising, test_size=0.3, random_state=42)
X_tr_t = torch.tensor(X_tr, dtype=torch.float32)
y_tr_t = torch.tensor(y_tr, dtype=torch.long)
X_te_t = torch.tensor(X_te, dtype=torch.float32)
y_te_t = torch.tensor(y_te, dtype=torch.long)
# NN classifier
torch.manual_seed(42)
class IsingClassifier(nn.Module):
def __init__(self, input_dim):
super().__init__()
self.net = nn.Sequential(
nn.Linear(input_dim, 64),
nn.ReLU(),
nn.Dropout(0.2),
nn.Linear(64, 32),
nn.ReLU(),
nn.Linear(32, 2), # 2 classes
)
def forward(self, x):
return self.net(x)
ising_nn = IsingClassifier(L * L)
optimizer = torch.optim.Adam(ising_nn.parameters(), lr=0.001)
criterion = nn.CrossEntropyLoss()
loader = DataLoader(TensorDataset(X_tr_t, y_tr_t), batch_size=32, shuffle=True)
# Train
for epoch in range(50):
ising_nn.train()
for bx, by in loader:
optimizer.zero_grad()
loss = criterion(ising_nn(bx), by)
loss.backward()
optimizer.step()
if epoch % 10 == 0:
ising_nn.eval()
with torch.no_grad():
pred_tr = ising_nn(X_tr_t).argmax(dim=1)
pred_te = ising_nn(X_te_t).argmax(dim=1)
acc_tr = (pred_tr == y_tr_t).float().mean().item()
acc_te = (pred_te == y_te_t).float().mean().item()
print(f"Epoch {epoch:2d} Train acc: {acc_tr:.3f} Test acc: {acc_te:.3f}")
# Final accuracy
ising_nn.eval()
with torch.no_grad():
final_acc = (ising_nn(X_te_t).argmax(dim=1) == y_te_t).float().mean().item()
print(f"\nFinal test accuracy: {final_acc:.3f}")
Epoch 0 Train acc: 0.924 Test acc: 0.919
Epoch 10 Train acc: 1.000 Test acc: 0.981
Epoch 20 Train acc: 1.000 Test acc: 0.981
Epoch 30 Train acc: 1.000 Test acc: 0.978
Epoch 40 Train acc: 1.000 Test acc: 0.986
Final test accuracy: 0.967
Summary#
Concept |
Key Idea |
|---|---|
Neuron |
Weighted sum + non-linear activation |
MLP |
Stack neurons in layers |
Activation functions |
ReLU (modern default), sigmoid, tanh |
Backpropagation |
Chain rule on the computational graph |
PyTorch |
Automatic differentiation + GPU acceleration |
Loss functions |
MSE (regression), cross-entropy (classification) |
Adam optimiser |
Adaptive learning rates — the default choice |
Overfitting |
Early stopping, dropout, weight decay |
NN potentials |
Learn \(V(r)\) and get forces \(F = -dV/dr\) via autograd |